With the increasing demand for comfort in the automotive field, noise control is particularly important, and people's impression of the vehicle's sound and vibration directly determines their willingness to buy. In recent years, "acoustics and vibration technology" in the field of automotive development has become increasingly important and has made significant progress. In acoustics research, steering system noise is divided into operational noise and functional noise, and the division is based on the driver's degree of influence on the noise and the duration of the noise. Steering system noise and noise have been a technical problem in the automotive industry, and it is the failure mode with the highest complaint rate of the steering system. rack and pinion noise is a key indicator of vehicle and system quality and has been a key concern of vehicle and component suppliers. With the improvement of NVH requirements and the popularity of electric vehicles, how to effectively curb steering system noise has become a key issue in the development of current and future automotive steering system products.
In this paper, based on a case of steering rattling that occurred during the test of a model in the early stage of product development, the source of the rattling was locked, the structural parameters of the rattling sample were optimized and the bench test was conducted to find out the factors affecting the steering rattling. According to the causes of failure, the corresponding corrective measures are formulated, and the mode, principle, control method, bench, and vehicle testing method, structural parameter improvement, and software optimization are analyzed in detail to investigate the root of the problem, in order to reduce the risk of steering rattling from the early stage of design, and the corrective measures are verified through testing to improve the steering rattling problem effectively.

1 Problem Description
In the early stage of product development, a strange noise was detected in the chassis during the dynamic road test of Steeringly's model with a tube-and-pillar electric power steering rack. After the subjective evaluation by the road testers, the initial judgment was that the noise was a crash noise, which originated from the chassis steering system. Dynamic road test steering reverberation will generally coexist with in-situ steering reverberation, by turning in-situ and judging the source of the reverberation in the cab, the reverberation can be judged to be from the lower part of the engine compartment outside the front partition of the body. Accurately locking the location of the steering noise, the steering transmission system components need to be objective data collection and analysis. For specific test sites see Figure 1

Figure 1 Steering gear test site
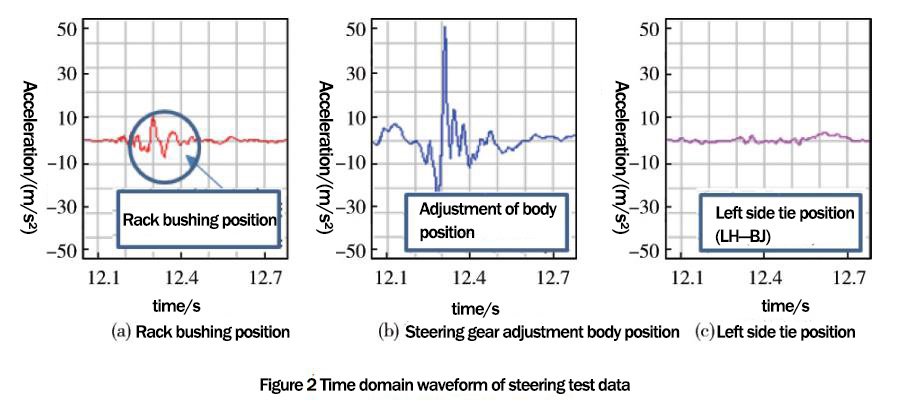
The sound data was collected by placing a microphone 150 mm from the driver's ear, and the vibration acceleration data of the rack bushing position, steering adjuster position, left side tie rod (L.IBJ) and right side tie rod (R.IBJ) positions were measured by the LMS data acquisition host. The vibration sensor was attached to the position corresponding to the steering test site, and the vibration sensor measurement data was compiled into a time-domain waveform using LMS.TEST.LAB after an objective test. Based on the time period of the microphone noise recorded on the driver's side, the time domain waveform from 12.1 s to 12.7 s was intercepted and analyzed, see Figure 2. The intercepted data are in the same coordinate range, and the data are compared according to the magnitude of vibration collected by vibration sensors at different locations. The data in Fig. 2 clearly shows the location of a large amount of vibration and vibration stabilization, and it can be determined that the reverberation occurs in the mechanical steering gear bushings and rack and pinion adjustment mechanism.
2 Analysis of the cause of the problem
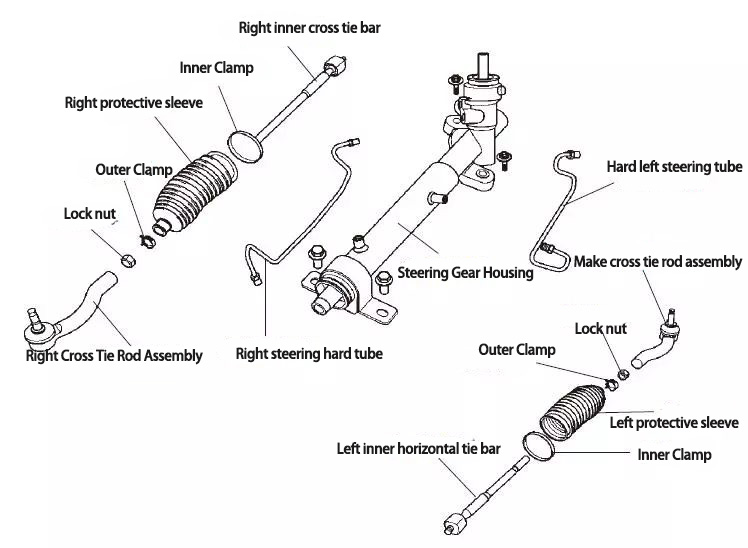
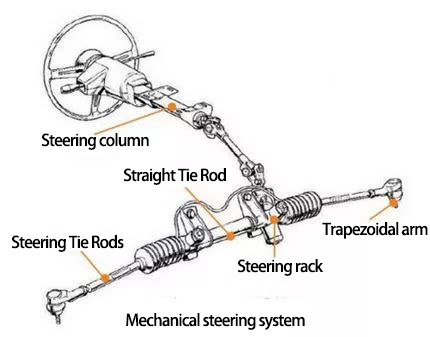
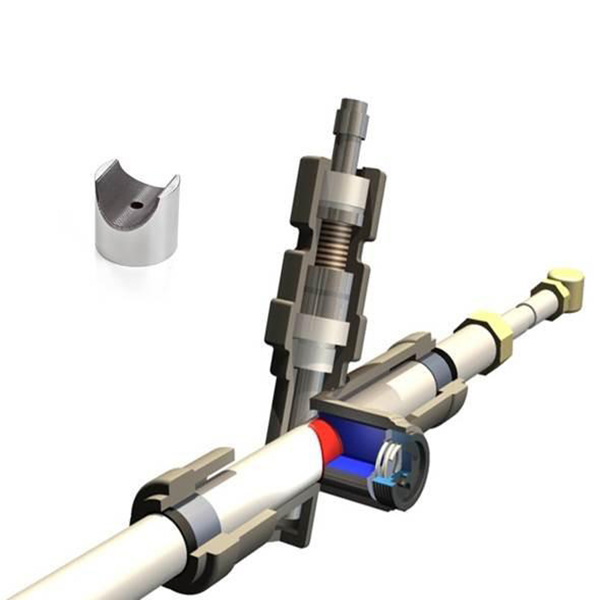
The steering rack noise is a kind of clattering sound, that belongs to the collision noise. Collision reverberation mainly refers to the noise generated by the parts in close proximity or in contact with each other under the action of dynamic load, knocking each other. When the steering system works, the steering gear shaft and the rack mesh drive, in the process, the rack is subject to axial thrust at the same time, also subject to the radial thrust from the gear shaft. For this reason, the rear of the rack is equipped with an adjustment body, and the end of the rack is equipped with a support sleeve to ensure the best performance when the steering gear is in operation. If there is a large gap between the rack and the adjusting body and between the rack and the support sleeve when the road is bumpy, it will produce a collision noise.
According to the disassembly and analysis of the sample parts of steering gears with unusual noise and the reproduction of unusual noise test, as well as the subjective evaluation of the steering noise and objective test analysis, it is confirmed The causes of the reverberation are as follows.
(1) Meshing clearance control
The rack and pinion clearance are too large. The tight fit of the rack and pinion are achieved by The tight fit of the gear rack is achieved by the compression force provided by the combination of pressure block, spring, and adjusting screw. of the gears. When the rack is subjected to external force, it will move away from the gear shaft, and at this time the rack will be the farthest from the gear shaft. The farthest distance between the rack and the gear shaft is the meshing gap of the rack and pinion gap. The larger the rack and pinion mesh gap, the farther the rack is from the gear shaft. The greater the clearance, the farther the rack is from the gear shaft. When impacted by the road, the noise generated by the mutual impact the greater the impact on the road. Therefore, the reasonable control of rack and pinion clearance becomes the key point to control Therefore, the reasonable control of rack and pinion clearance becomes the key point to controlling the steering gear reverberation.

(2) Adjustment body factor
The hardness of the O-ring between the adjusting body and the housing is low, and during the movement In the process of movement, the adjusting body and the shell produce collision noise. There is no axial cushioning device between the adjusting body and the adjusting screw. There is no axial cushioning device between the adjusting body and the adjusting screw, so when the steering gear is subjected to large axial load When the steering gear is subjected to large axial load, it is easy to have impact noise.
(3) Support set gap control
The gap between the rack and the support sleeve is too large. The support sleeve plays the role of supporting the rack in the steering gear and keeping the rack in a straight running state during the motion. The support sleeve plays the role of supporting the rack and keeping the rack in a straight state during the motion. If the clearance between the support sleeve and the rack is too large, it will cause the rack to move in a straight line. If the clearance between the support sleeve and the rack is too large, the rack will be deflected during the movement, which will cause a strange noise. When the vehicle passes through the bumpy road, the noise is especially obvious
According to the above analysis, the causes of the steering gear noise are determined, and it is necessary for The structural parameters of the steering gear should be optimized and improved. However, with the control of the steering gear gap control, the steering rack reverse thrust parameter also increases. The damping compensation of the electric power steering controller needs to be adjusted to solve the performance degradation caused by the structural improvement. The performance degradation caused by the structural improvement needs to be solved by adjusting the damping compensation of the electric power steering controller.
3 Complete vehicle testing
(1) Reasonable control of rack and pinion clearance
Since small-angle steering is a common working condition, the rack and pinion wear faster in the steering wheel ± 180° range. By controlling the radial meshing clearance between the rack and pinion in the production line to be 0. 1 mm or less for the full travel, the radial meshing clearance is optimized to be 0. 08 mm or less in the ± 180° range, and 0. 1 mm or less in the other ranges. Controlling the initial clearance of the steering gear and rack can effectively reduce the occurrence of steering noise after durability.
(2) Reasonable adjustment of the body and shell structure, increase the axial buffer device
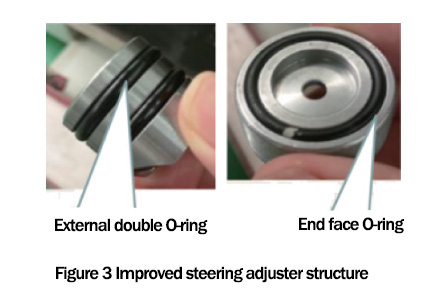
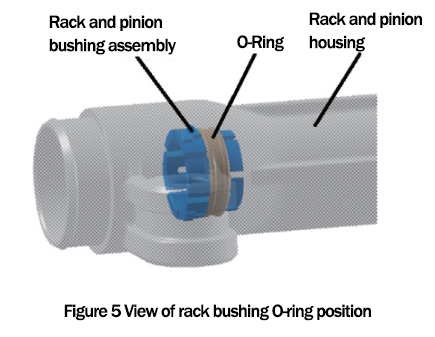
Currently, there are two main types of adjusting body structure: ① without an O-ring outside; ② only with an O-ring. The structure without O-ring has no O-ring cushioning between the outer circumference of the adjusting body and the inner wall of the shell, so it is easy for the two to collide with each other and make a strange noise. In order to effectively solve the steering rattle, the structure of the steering adjuster body is optimized by adding two O-rings in the outer circle direction and one O-ring on the end face (see Figure 3). The new structure can effectively compensate for the disadvantages of the first two structures and improve the bumpy road noise effectively. The new structure can effectively compensate for the disadvantages of the previous two structures and improve the bumpy road noise. See Fig. 4 and Fig. 5.

(3) Reasonable control of rack and support sleeve clearance
The sum of the clearance between the rack and the support sleeve in both directions is adjusted from less than or equal to 0. 2 mm to less than or equal to 0. 15 mm (60 N each of vertical thrust and tension is applied at the end of the rack). The change is made by adjusting the hardness of the rack bushing from Hs70 to Hs90 to achieve the clearance control in the required range, and at the same time, two grooves are designed in the contact surface of the new bushing to store the grease, which can reduce the sliding friction and reduce the wear.
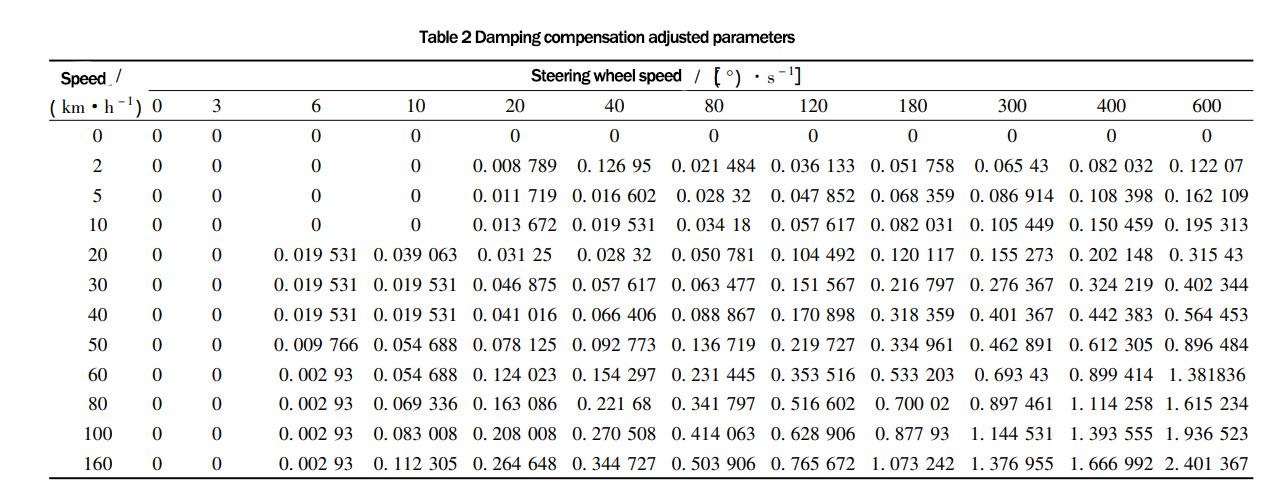
(4) Balance the backward thrust of the rack and adjust the damping compensation parameters
After adjusting the structure parameters of the steering gear, the reverberation is optimized and improved. However, the corresponding reverse thrust of the steering gear will increase with the control of clearance. The reverse thrust will be increased from 130 N to 160 N on average. In order to balance the steering performance, the electric power steering system is adjusted by the electronic control unit ECU to compensate for the reduced performance caused by the reverse thrust. See Table 1 and Table 2.
Through the adjustment of electric power tuning parameters, the steering performance is effectively maintained while avoiding steering noise. the steering performance is effectively maintained while avoiding steering noises.

4 Effect verification
According to the above optimization scheme idea, refine the specific scheme, after The steering gear meshing clearance control, adjusting the structure of adjusting body assembly, rack bushing clearance control, damping compensation, and other measures to effectively improve the overall vehicle steering The occurrence of steering rattling is effectively improved. The above-modified scheme was tested on the whole vehicle endurance road The improvement effect is determined by the objective test and subjective evaluation of the whole vehicle. The results of the improvement were determined by objective testing and subjective evaluation. The test equipment used is the Siemens LMS data acquisition mainframe (model SCR05-1), and the test equipment used is the LMS data acquisition mainframe. The test equipment used is Siemens LMS data acquisition mainframe (Model SCR05-1), microphone, three-way accelerometer (Model 365A32), and acoustic marker. The test results are shown in Figure 6.
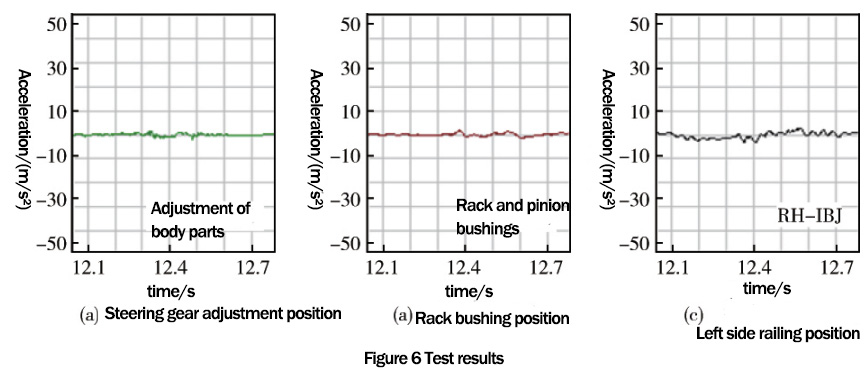
Validation: After the implementation of the above solution, the steering improvement effect is obvious. After the comprehensive endurance road test and subjective evaluation, the steering performance passed acceptance.
5 Conclusion
According to the phenomenon of steering rattling, the causes of steering rattling due to the structure design of steering gear are analyzed. The causes of steering rattling due to unreasonable design are analyzed, and the optimized design is proposed. The design optimization plan is proposed. The corresponding corrective measures were formulated and verified by test. The solution is feasible and can effectively solve the steering problem and ensure steering performance. The following conclusions are drawn from the analysis of the causes of the steering rattling problem, the customization of the solution, and the test verification. The following conclusions are drawn from the analysis of the causes of the steering rattling problem, customization of the solution, and test verification:
In order to confirm and analyze the reverberation problem during the test or customer's feedback, we should go to the site to find out the part where the reverberation is generated, then analyze the specific causes according to the part where the reverberation is generated, and formulate effective improvement or prevention countermeasures. Through testing, it is proved that controlling the steering gear and rack meshing clearance, adjusting the body structure and rack bushing clearance can effectively reduce the steering noise. For the poor steering performance caused by the adjustment of steering structure, the relationship between the noise and performance can be balanced by the tuning of electric power parameters to achieve the optimal effect.
The analysis and research in this paper provide valuable experience for the subsequent development of such problems. The analysis and research in this paper provide valuable development experience for solving such problems in the future development of electric steering systems. In the process of future electric steering system development, through the reasonable design and full verification of the steering system mechanism, and the reasonable matching of the tuning parameters, the steering variation can be effectively prevented. In the future development of the electric steering system, the steering noise problem can be effectively prevented through the reasonable design and verification of the steering mechanism and the reasonable matching of the tuning parameters. In the future development of the electric steering system, the steering noise problem can be effectively prevented through reasonable design and verification of the steering system mechanism and reasonable matching of tuning parameters.
(We do not share your data with anybody, and only use it for its intended purpose)
The Previous Articles:
What Is Rack and Pinion Bushing? How To Tell If Rack and Pinion Bushings Are Bad?
Why Steering Rack Makes Noise When Turning?
How To Rebuild A Steering Rack?
What Is A Rotary Valve Power Steering Rack?
Rack And Pinion System Vs Power Steering System: What Are The Differences?
Power Steering Rack Market Analysis Report (Japan Market)
What Causes Steering Rack to Go Bad?
Design Of Car Rack And Pinion Steering Racks
What Is The Intelligent Steering Rack Used By VW, Toyota, Honda And Renault?



Leave A Comment